O Protótipo / Construção do Protótipo
Como ponto de partida, foram feitas reuniões com tecnicos de saúde na área do conhecimento da fisioterapia, tendo como objetivo a pesquisa de informação e a procura de soluções para os objetivos propostos.

Depois dos objetivos definidos, foram elaborados os projetos e reunidos os materiais a utilizar.
Início da construção
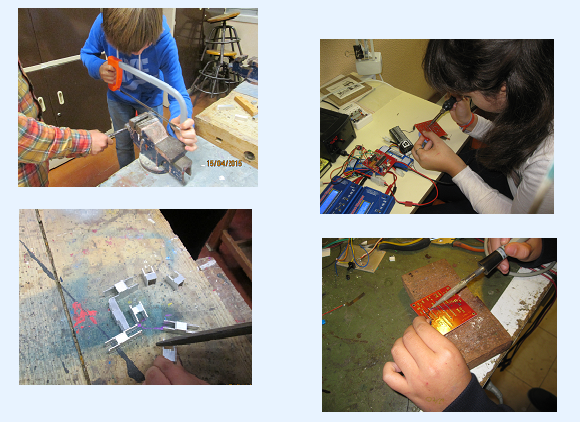
O grupo de trabalho foi dividido em duas equipas com tarefas específicas a executar. Enquanto uma das equipas desenvolveu a parte mecânica, a outra trabalhou a parte eletrónica. Reunimos períodicamente para avaliação e articulação do trabalho.
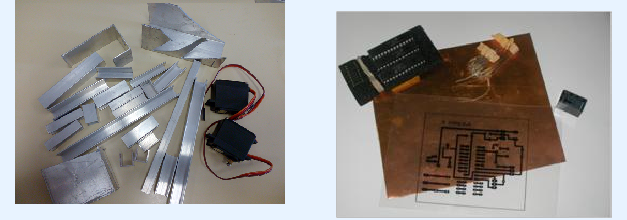
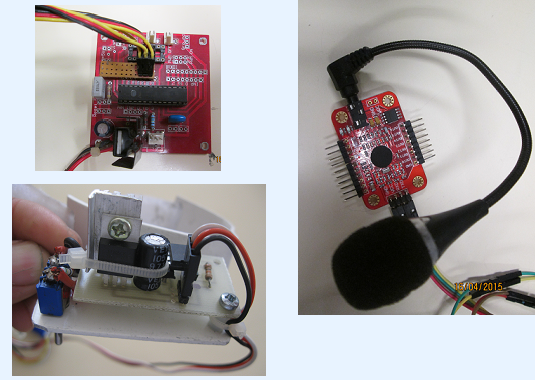
Para a elaboração do sensor do braço, que utiliza o microcontrolador Picaxe, foi necessário a construção de um circuito impresso recorrendo à utilização do programa "PCP Artist".
Para a construção da parte mecânica, foram reaproveitados materiais, como por exemplo restos de alumínios, provenientes de empresas que fabricam caixilhos para janelas.
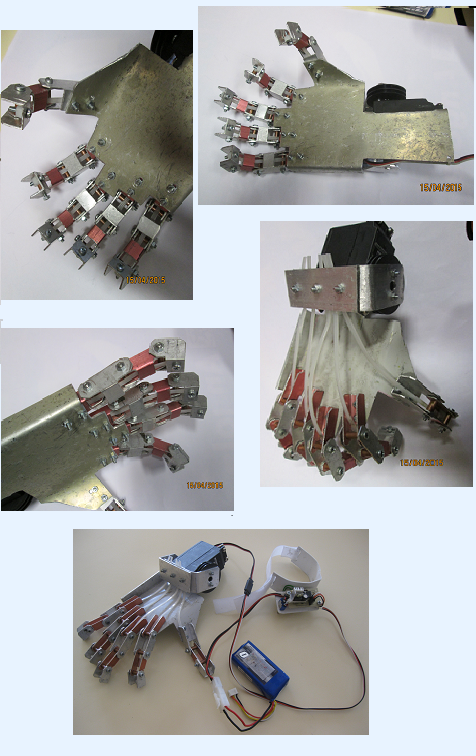
Foram cortadas as peças de alumínio que juntas começam a ter a forma de uma mão.
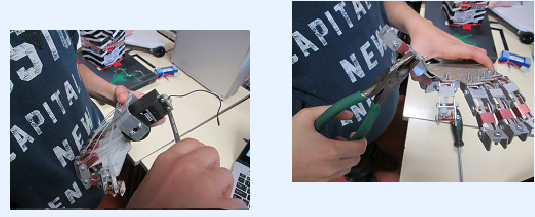
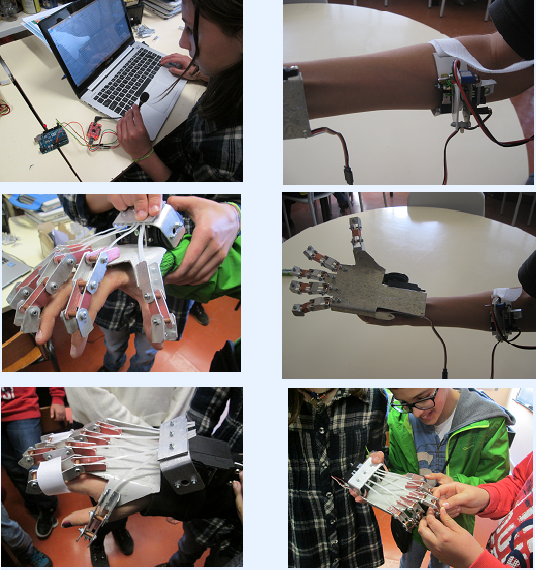
Montagem da placa do sensor para o braço, com utilização do microcontrolador Picaxe, assim como a placa do sensor de reconhecimento de voz.
Teste de funcionalidade com o protótipo. Foi utilizado o programa "Picaxe Editor" para a programação do microcontrolador Picaxe. O sensor e a placa do microcontrolador encostados aos tendões do braço com fita velcro, permitem controlar os movimentos da mão, captando tensões, traduzindo-as em sinais a enviar ao microcontrolador. O microcontrolador, por sua vez, traduz esses sinais em impulsos elétricos, enviando-os para o servomotor que movimenta a mão biónica.