
|
Com base no tema proposto de "Desafiar a Robótica" um grupo de alunos da nossa escola desenvolveu réplicas de movimentos do corpo humano através da construção de braços, cotovelos ou mãos robóticas acionadas por comandos autónomos ou programadas para determinadas rotinas, possibilitando assim satisfazer, com mecanismos simples, as necessidades de algumas pessoas que estejam limitadas nestes membros, permitindo-lhes, por exemplo, alcançar objetos distantes do corpo. Alguns dos protótipos desenvolvidos, podem ainda ser programados para uso em tratamentos de fisioterapia na execução continuada de movimentos repetitivos.
Na sequência do desenvolvimento do projeto, foram estabelecidos contatos e parcerias com alguns profissionais de saúde, nomeadamente Dr. Portela (ortopedista) e com a Clínica Fisiotorres - Centro de Fisioterapia de Torres Vedras, na pessoa da Drª Ana Gonçalves. Foram efetuadas reuniões entre os técnicos, alunos e professores das disciplinas envolvidas, com o objectivo de articular saberes.
A biónica é um desafio inovador na ciência e tecnologia, envolve um estudo multidisciplinar: mecânica, permite conhecer a forma como os mecanismos se ligam a um corpo biológico; dinâmica, como se move simulando os movimentos do corpo; e elétrica, como comunica com sistema nervoso. Assim sendo, o projeto envolveu a comunidade escolar, nas disciplinas de Ciências Naturais, Matemática, Educação Física, Educação Visual, Educação Tecnológica, Tecnologia da Informação e Comunicação. O procedimento experimental centrou-se na pesquisa, demonstração e avaliação de forma a procurar as melhores soluções para a criação de protótipos que reúnam as especificações dos objetivos propostos.
Em resultado da participação ativa dos intervenientes neste projecto, podemos agora apresentar alguns protótipos:
-
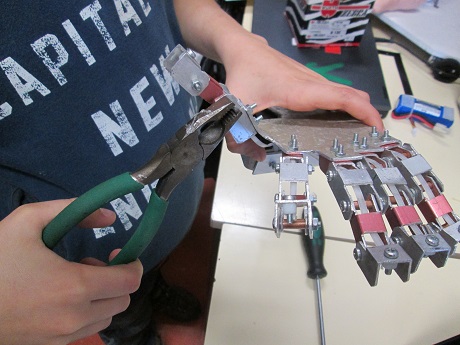
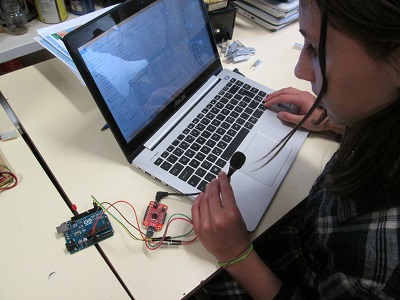
Um dos protótipos consiste no sistema convencional de juntar servomotores, microcontroladores e sensores, a partes mecânicas similares a braços, cotovelos ou mãos robóticas.
Os sensores permitem captar a instrução e executar o movimento pretendido pelo paciente. Os sensores utilizados podem ser um simples micro switch encostado aos tendões que controlam os movimentos da mão e traduzem isso em sinais a enviar ao microcontrolador que por sua vez, traduz esses sinais em impulsos elétricos, ou sensores de voz que podem consistir em placas de comandos previamente gravados de acordo com o gosto ou necessidade do paciente, por exemplo: “segura” o objeto e “solta” o objeto, etc.
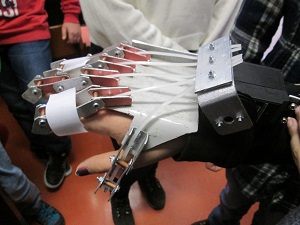
Este protótipo pretende com alguma simplicidade satisfazer de forma autónoma algumas das necessidades básicas de deficientes motores ou pessoas temporariamente debilitadas. Atividades como agarrar um objeto são movimentos simples para nós, mas para os pacientes que perderam ou não possuem este movimentos, traz uma grande satisfação em os realizar de uma forma autónoma.
-
Outro dos protótipos tem aplicabilidade na fisioterapia assistida por robô. Partes mecânicas similares a braços, cotovelos ou mãos robóticas, permitem aos pacientes fazer uma série de movimentos repetitivos, adaptados às necessidades prescritas pelo fisioterapeuta para a recuperação, com a diferença de que, em vez de ser um fisioterapeuta a auxiliar nos exercícios, é o robô que exerce essa função.
Para além do trabalho desenvolvido em sala de aula, entre muitas atividades, podemos salientar as seguintes:
-
Reuniões com profissionais de saúde da Clínica de Saúde Fisiotorres e Médico Ortopedista do Centro Hospital do Oeste;
-
Apresentação e demonstração do projeto desenvolvido à comunidade escolar e comunicação social.
|
|