O Protótipo / Proteses Biónicas
A robótica no controlo da Biónica
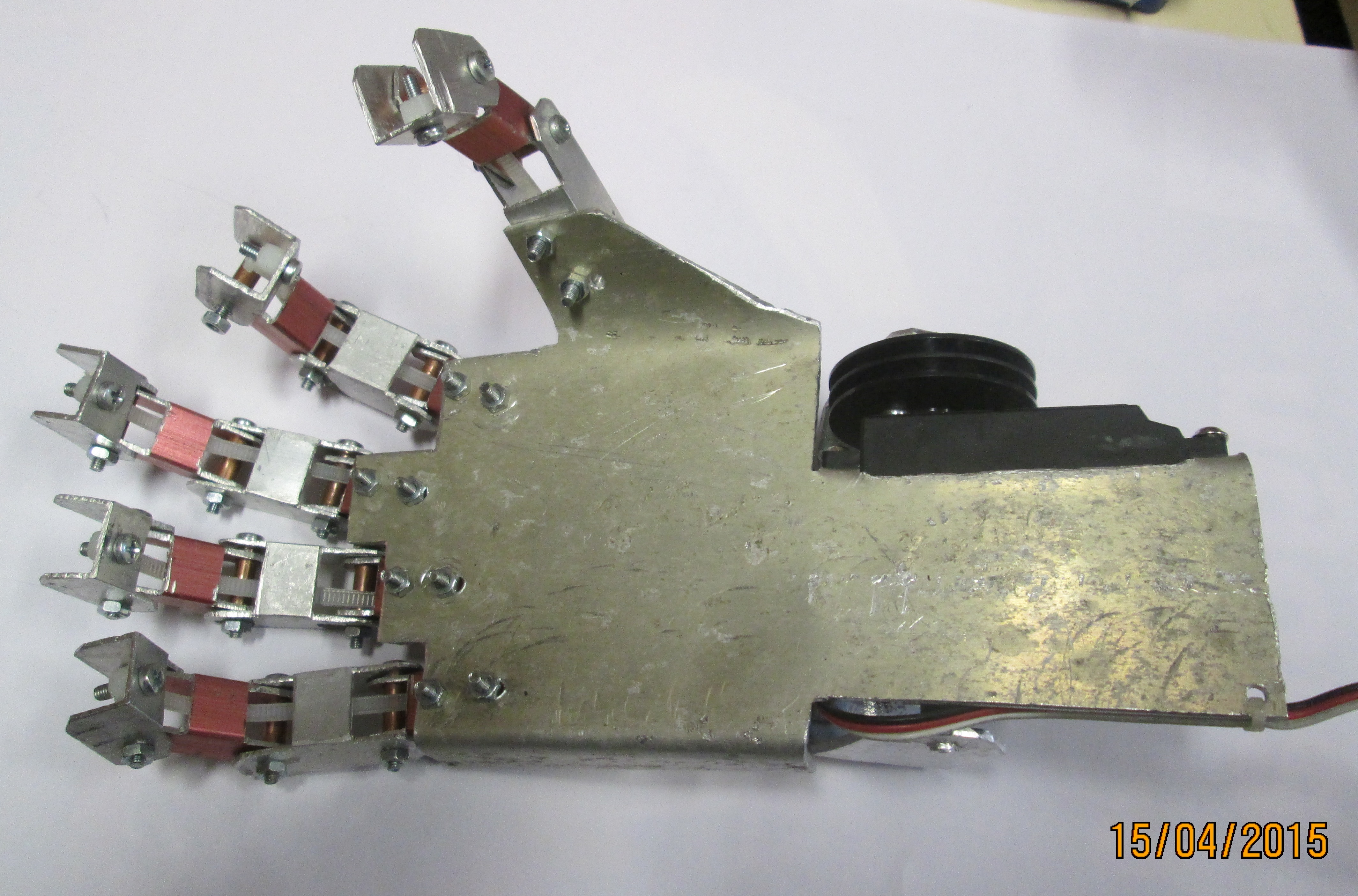
O protótipo desenvolvido consiste numa prótese de ‘’Mão Robótica’’ que pode ser controlada por comando de voz ou através de um sensor encostado aos tendões que controlam os movimentos da mão, e traduzem isso em sinais a enviar ao microcontrolador. O microcontrolador, por sua vez, traduz esses sinais em impulsos elétricos que são enviados para o servomotor que permite movimentar a mão biónica. Desta forma, os pacientes ganham mais autonomia recuperando alguns movimentos que tinham perdido.
Na verdade quando falamos de robótica, mecatrônica, biónica é preciso situar muito bem todas estas ciências, pois todas elas têm algumas semelhanças e o protótipo apresentado explora todas estas áreas do conhecimento.
Quando falamos de mecatrónica estamos a falar de sistemas mecânicos que associados a sistemas eletrónicos realizam tarefas automáticas, parecendo indicar alguma inteligência. Por outro lado, quando falamos de biónica, estamos a falar da associação da robótica à mecatrónica, no sentido de proporcionar benefícios à nossa sociedade que, aquando da aplicação destas ciências poderá colmatar algumas das suas necessidades.

Vantagens do Protótipo
-
Simplicidade de construção, na medida em que apenas um único servomotor pode controlar todo o mecanismo. .
-
Sendo que a informação sensorial é feita por um sensor aplicado no braço do paciente ou por um comando de voz, será muito mais fácil e natural para o paciente controlar a mão mecânica. Por exemplo: o paciente ao querer fechar a mão, o sensor no braço vai controlar autonomamente a tarefa pretendida a executar com a mão.